![]()
![]()
![]()
Use LEFT and RIGHT arrow keys to navigate between flashcards;
Use UP and DOWN arrow keys to flip the card;
H to show hint;
A reads text to speech;
67 Cards in this Set
- Front
- Back
|
What 4 things should a good scheduler do? |
1) minimize user response times of all interactive processes (major objective today!) 2) maximize system throughput 3) be fair 4) avoid starvation |
|
|
What is starvation? |
Some ready processes never get core time, which is a problem typical to schedulers using priority i.e its when the lowest priority processes keep getting set aside. |
|
|
How is starvation remedied? |
Increase priorities of processes that have waited too long. |
|
|
Which is more difficult, ensuring fairness or avoiding starvation? |
Ensuring fairness. |
|
|
What does a non-preemptive CPU scheduler never do? |
It will never remove a core from a running process; it will wait because the process has yet to release the core, issue a system call, and terminate. When it does so, it is obsolete. |
|
|
What is FCFS? Describe it. |
First come first served (FCFS) simple and easy to use scheduler that uses FIFO queue |
|
|
Why is FCFS not as great as it sounds? |
Processes that require less core time have to wait behind processes that make bigger demands. |
|
|
What is SJF? What does it do? |
Shortest job first (SJF) Gives a core to the process requesting the least amount of core time. |
|
|
List +/-s of SJF. |
+ gives a core to the process requesting the least amount of time +reduces average wait - must know ahead of time how much of core time each process needs, which is impossible - still lets processes monopolize a core |
|
|
What does a preemptive scheduler do? |
Temporarily returns a running process to the ready queue whenever another process requires that core in a more urgent fashion. |
|
|
When does a process demand a core more urgently than normal? |
1) when it has been waiting for too long. 2) when it has higher priority. |
|
|
List the traits of preemptive schedulers without priorities. |
1) all processes have the same priority 2) ready queue is FIFO |
|
|
List the traits of preemptive schedulers with priorities. |
1) use multiple queues 2) differ in the way they adjust process priorities |
|
|
What basic assumption does round robin make? |
It assumes that all processes have the same priority. |
|
|
What differentiates round robin from FCFS? |
processes only get a core for up to T time units |
|
|
What happens to processes that exceed their slice time? |
They return to the end of the ready queue. |
|
|
What is the benefit of using a large time slice? |
Less context switches |
|
|
What is the benefit of using a small time slice? |
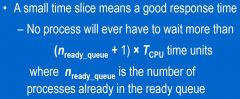
|
|
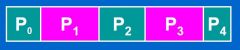
Is this a true CPU schedule? |

No, it is ideal. The graphic here is a true CPU schedule. |
|
|
What problem do you need to solve to find the right time slice? |

Adjust the time slice to guarantee a maximum waiting time in the ready queue. |
|
|
How much system load leads to very small time slices being produced? Is there a problem with this? Justify your answer. |
heavy load, Yes, results in overabundance of context switch overhead |
|

When does this equation work well? |
When a system is lightly loaded. |
|
|
What happens to a system using a round robin scheduler when the workload exceeds some threshold? |
The throughput of the system decreases. |
|
|
How is the decreased throughput of an overloaded RR solve? |
By adding priorities. |
|
|
What do the new priorities that solve decreased throughput of an RR distinguish among? |
1) CPU bound processes (large amounts of core time) 2) interactive processes 3) IO bound processes (small amounts of core time) |
|
|
Organize by priority: IO bound processes, interactive processes, CPU bound processes |
interactive IO CPU |
|
|
How does the size of time slices assigned to a process correspond to its priority? |
Highest priority = smallest time slices Lowest pritority = biggest time slices higher priority processes can take cores from lower priority processes |
|
|
How is the response time of an interactive process affected by its priority? |
interactive processes will get good response times |
|
|
How does prioritizing the CPU aid overloaded RR? |
CPU bound processes will get the CPU... less frequently than with RR and for longer periods of time thus there will be less context switch overhead |
|
|
What two problems arise when dealing with RR overload? |
1) how is priority assigned to processes? (since process behaviors can change during their execution) 2) how is starvation avoided? |
|
|
How is priority assigned to processes? (since process behaviors can change during their execution) |
Dynamic priorities are used. |
|
|
Summarize the reward/penalize scheme of dynamic prioritizing. |
Reward: 1) processes that use system calls 2) processes that interact with user 3) processes that have been in the ready queue for an extended period of time Penalize: processes that have exceeded their time slice |
|
|
What is the numeric priority convention for UNIX System V?
|
0 is lowest |
|
|
What is the numeric priority convention for most UNIX systems? |
0 is highest |
|
|
What is the numeric priority convention for Linux? |
0 is highest |
|
|
What is the numeric priority convention for Windows NT and beyond? |
0 is lowest |
|
|
Name the three process classes of a system V.4 scheduler |
1) real-time 2) time-sharing 3) system (for kernel processes) |
|
|
Of the three process classes, which has the lowest priority? |
time-sharing |
|
|
Of the three process classes, which has the highest priority? |
real time |
|
|
Are real time priorities fixed? |
yes |
|
|
Are time-sharing priorities fixed? |
No, they use variable priorities |
|
|
In a time-sharing process, what can the system administrator specify at each priority level? |
1) maximum flexibility 2) maximum risk of making a bad choice |
|
|
In a real-time process, what can the system administrator specify at each priority level? |
a different quantum size (rt_quantum) |
|
|
What can happen to a time-sharing processs if there are too many tuning options left to the system admin? |
the likelihood of the system being "out of tune" increases |
|
|
Recall the five examples of time-sharing parameters given in the slides. |
1) quantum size (ts_quantum) 2) new priority for processes that use their whole CPU quantum (ts_tqexp) 3) new priority for proc returning from waiting state (ts_slpret) 4) Max. amount of time a process can remain in the ready queue without having priority recomputed (ts_maxwait) 5) new priority for processes that have been in the ready queue for ts_maxwait (ts_lwait) |
|
|
The priority of a process is decreased when... |
it has exhausted its time quantum |
|
|
The priority of a process is increased when... |
1) it has completed a system call 2) it has waited a in the ready queue for a long time |
|
|
Which of the five examples of time-sharing parameters given in the slide are used to reward "good" behaviors? |
ts_slpret ts_lwait |
|
|
Which of the five examples of time-sharing parameters given in the slide are used to reward "bad" behaviors? |
ts_tqexp |
|
|
a |
a |
|
|
What does IVP stand for? Name three types of equations that this encompasses.
|
initial value problem 1) first order equations 2) higher order equations 3) systems of differential equations"
|
|
|
What does BVP stand for? Name two types of problems that this encompasses
|
"boundary value problems 1) two point boundary value problems 2) Strum–Liouville eigenvalue problems"
|
|
|
What does PDE stand for?Name three types of equations that this encompasses.
|
"partial differential equation 1) diffusion equations 2) advection equations 3) wave equations"
|
|
|
What form must a second order differential equation have to be linear?
|
"a*y'' + b*p(x)*y' + q(x)*y = g(x), where a, b, and c are constants p(t), q(t) and g(t) are functions of x"
|
|
|
How many priority bands does Mac OS X use in its multi–level feedback queue?
|
four
|
|
|
Name the priority bands that Mac OS X uses in its multi–level feedback queue.
|
"Normal, System high priority, Kernel mode only, Real–time"
|
|
|
Does Mac OS X manage processes with its multi–level feedback queue?
|
No, it manages threads.
|
|
|
How do Mac OS thread priorities vary?
|
"1) they must remain within their bands, 2) realtime threads tell the scheduler the number (A) of clock cycles they will need out of the next (B) clock cycles."
|
|
|
How many priority levels does a Windows scheduler have? How are they divided up?
|
"32, 0:15 for other threads, 16:31 for real–time threads"
|
|
|
Does a Windows scheduler manage threads or processes?
|
threads
|
|
|
Real time threads run at __________ between 16 and 31
|
fixed priorities
|
|
|
In what situation can real–time threads be preempted? Are there many situations?
|
"a higher priority process arrives. nope"
|
|
|
Does the base priorty of a thread change?
|
No
|
|
|
Between what values can a base priority be incremented/decremented by?
|
–2:2
|
|
|
When do thread priorities go below their base priority?
|
They don't.
|
|
|
When is a thread priority incremented?
|
when they return from the waiting state
|
|
|
When is a thread priority decremented?
|
When it exhausts its time.
|